Úvod
Bikros patří mezi individuální sporty, kde mezi sebou soupeří osm jezdců, kteří se snaží projet co nejrychleji přibližně 350 metrů dlouhou dráhu s množstvím různých skoků. Dráha začíná startovním pahorkem, vysokým 3 až 5 metrů, o minimálním sklonu 15°. Mívá většinou 3 nebo 4 zatáčky a bývá ve tvaru podkovy nebo hada. Povrch dráhy je pevný, uválcovaný, jako materiál se používá šotolina nebo hlína, povrch zatáček bývá někdy asfaltový. S účastí bikrosu na olympijských hrách vznikla ještě jeho extrémní odnož, tzv. supercross. Liší se výškou startovního pahorku, která bývá přes 10 metrů. Jezdci pod ním dosahují rychlosti přes 50 km/h. Skoky na dráze mohou být díky velké rychlosti delší a některé z nich přesahují vzdálenost 10 metrů.
I přesto, že bikros vznikl již v 60. letech minulého století, metodika sportovního tréninku, podložená biomechanickými, kineziologickými a fyziologickými studiemi v tomto sportu, není příliš zpracována a je nedostatek odborníků a trenérů, kteří by se tímto problémem zabývali. Podle dostupných informací byl první, kdo se zabýval bikrosovým startem Boros [1]. Později se BMX startu věnovali autoři Ruffell a Evans [2]. Od té doby se však technika startu změnila. Na základě zkušeností ze závodní praxe i teoretických analýz bikrosového závodu, které jsme provedli dříve [3, 4] (Kalichová, Hřebíčková, Bernaciková&Labounková, 2011, Kalichová, Hřebíčková &Labounková, 2012), jsme se rozhodli zabývat se touto důležitou fází celého závodu, tedy bikrosovým startem. Jedná se o limitující faktor úspěšnosti v celém závodě, kvalita jeho provedení je často pro výsledek jízdy rozhodující [5, 6] (Zabala a kol., 2009, Debraux, 2010).
Start je jedním z nejdůležitějších determinantů celého závodu, zároveň však jednou z nejkomplexnějších a nejsložitějších fází závodu kvůli vysokým požadavkům jak na koordinaci, tak i na zrychlení. Start je tak podmíněn kombinací schopnosti reakční, rychlostně-silových a koordinačních schopností [7, 8] (Lefebvre, 2010, Dorémus, 2011). Vedle těchto schopností vidí Gianikellis a kol. [9] podstatnou proměnnou, ovlivňující kvalitu provedení startu, v technické vyspělosti závodníka.Mateo, Blasco-Lafarga a Zabala [10] (2011) prezentovali studii, ve které se zabývali vztahem mezi vyvinutou rychlostí jízdy a acyklickými fázemi BMX závodu.
Technika provedení startu
Start na rampě ze dvou pedálů je v současné době nejrychlejším provedením startu. Při startu ze dvou pedálů rozeznáváme tři typy startu [8] (Dorémus, 2011): tlačený start, klasický start s pohybem kola vzad a start „slingshot“. Startovní pohyb je nutné zahájit mnohem dříve, než rampa spadne, aby v okamžiku dopadu rampy na zem byl jezdec již v pohybu směrem vpřed. Zahájení pohybu je u každého individuální, ale u většiny jezdců začíná ihned po zaregistrování prvního světelného nebo zvukového signálu.
V naší práci se budeme zabývat z biomechanického hlediska bikrosovým startem, a to klasickým startem s pohybem kola vzad, což je nejčastěji používaný způsob startu. Tento typ startu je založen na koordinaci a synchronizaci pohybu těla s pohybem mříže na základě světelného či zvukového signálu. Lefebvre [7] (2010) i Dorémus [8] (2011) dělí tento start na dvě fáze: fázi pohybu kola vzad a fázi zrychlení neboli fázi výjezdu ze startovního zařízení. Stručná charakteristika techniky tohoto startu je následující.
Jezdec opře kolo o startovní zařízení. Na svém kole stojí, pedály si srovná tak, aby silnější (startovací) noha byla vpředu a zadní noha přibližně ve výšce zadní stavby kola. Obě nohy jsou mírně pokrčené. Výška umístění pedálu závisí na sklonu startovního pahorku. Tělo se nakloní mírně vzad, a to tak, aby ruce byly mírně pokrčené, stejně jako přední noha. Záda by měla být rovná. Poloha hlavy závisí na druhu podnětu, na který jezdec startuje. Pokud startuje na světelné signály, hlava je zvednutá a pohledem jezdec sleduje semafor umístěný pod startovním pahorkem. Při startu na zvukový signál se jezdec dívá do země těsně za startovní rampou, hlava je tedy v prodloužení páteře. Na kole udržujeme rovnováhu, než zahájíme pohyb přitažením boků k řídítkům. Ramena jdou dopředu, nacházejí se přibližně nad řídítky, krk je v prodloužení páteře, hlava skloněná, pohled je upřen na přední kolo (viz obr. 1). Zároveň přední kolo lehce nadzvedneme a zabereme přední nohou do pedálu, zadní noha tahá pedál nahoru.
Na základě předešlé pilotní studie [4] (Kalichová, Hřebíčková &Labounková, 2012) se domníváme, že pro hlubší analýzu startovního pohybu je vhodné podle klíčových pohybů, které jezdec provádí, rozdělit tuto složitou pohybovou strukturu na více fází a podrobněji rozebrat jejich charakteristiky.
Methods
Jedná se o případovou studii, jejímž cílem je na základě 3D kinematické analýzy ukázat, které kinematické charakteristiky jsou v jednotlivých fází bikrosového startu významné, jaké jsou jejich hodnoty a míra jejich změn. Výsledky této práce by měly sloužit jako základ pro další analýzy této pohybové struktury s větším výzkumným souborem. Při výběrů testovaných osob vhodných pro měření byl kladen důraz na jejich vysokou výkonnost, technicky zvládnuté provedení startu a stabilní výkony na startu. Byli vybráni dva jezdci z reprezentace České republiky.
Testovaná osoba 1 (TO1) : žena, 22 let, závodí od 6 let, výška 168 cm, hmotnost 65 kg.
TO1 je členkou reprezentace České republiky v bicrossu i fourcrossu, získala medaile z mistrovství světa i Evropy. V tréninkové přípravě bikrosový start nacvičuje během celého roku, v zimní přípravě 1x týdně, v závodním období 2-3x týdně.
Testovaná osoba 2 (TO2) : muž, 21 let, závodí od 5 let, výška 182 cm, hmotnost 88 kg.
TO2 je již od juniorského věku stálým členem reprezentace České republiky v bikrosu. Jezdec zaznamenal výrazné výsledky v juniorských letech, kdy získal dva tituly Mistra ČR a pravidelně se umisťoval do 8. místa na závodech mistrovství Evropy. Po přechodu do elitní kategorie se stále prosazuje na přední místa v závodech na území České republiky. Stejně jako TO1 zařazuje nácvik techniky startu do přípravy během celého roku. V zimním období 1-2x týdně, v závodním období 2-3x týdně.
Po potřebném rozcvičení a krátkém nácviku startů absolvovaly obě testované osoby pět měřených startů. Na základě konzultace s nimi i jejich trenérem byl vybrán nejlépe provedený pokus, který byl následně analyzován. V rámci tréninkové přípravy bylo měření prováděné těsně před začátkem závodní sezony. Obě TO byly v dobré kondici a zdravotním stavu.
K získání dat jsme použili kinematografickou metodu. Natáčení jsme provedli pomocí dvou vysokofrekvenčních synchronizovaných digitálních kamer SIMI Motion o frekvenci záznamů 100 snímků za sekundu. V softwaru SIMI Motion jsme pak záznamy následně zpracovali. Tento software je vytvořený německou firmou SIMI Reality MotionSystemeGmbH. Testované osoby byly opatřeny reflexními kuličkami, které umožnily snadnější vyhodnocení videozáznamu. Byly označeny všechny hlavní klouby – zápěstí, lokty, ramena, boky, kolena a kotníky.Po skončeném natáčení byla data dále zpracovávána na počítači v programu SIMI Motion. Z pořízených záznamů byl vyhodnocen vždy jen nejúspěšnější, tedy nejrychlejší pokus obou testovaných osob, a to od chvíle rozsvícení startovního červeného světla po konec druhého šlápnutí. Sledovali jsme jen ty parametry, které mají nezanedbatelný vliv na správné provedení techniky.
Výsledky
Pohybové fáze bikrosového startu
Obr. 1 Kinogram provedení bikrosového startu – 1. až 5. fáze
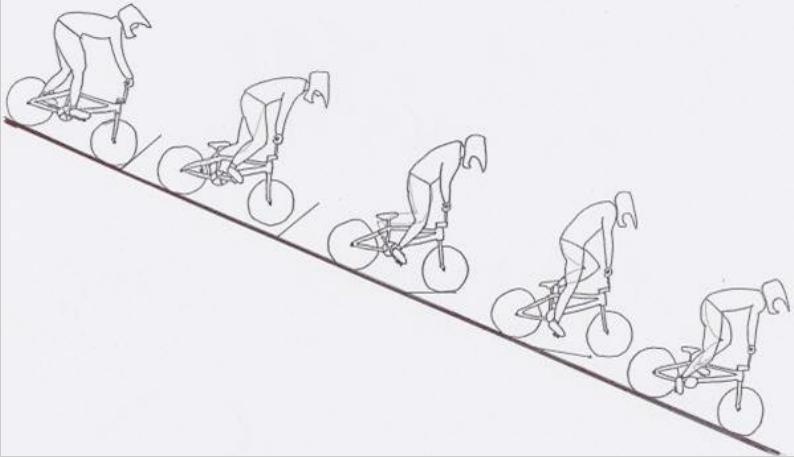
Na základě měření a rozboru výsledků můžeme rozeznat pět rozdílných fází, jak je také ukazuje kinogram (obr. 1). Pro těchto pět fází je podstatný pohyb kotníku, zejména jeho okamžitá rychlost.Obrázek 2 názorně ukazuje na základě změn této proměnné hranice mezi jednotlivými fázemi.
Obr. 2 Závislost rychlosti na čase pohybu kotníku přední záběrové dolní končetiny u TO1
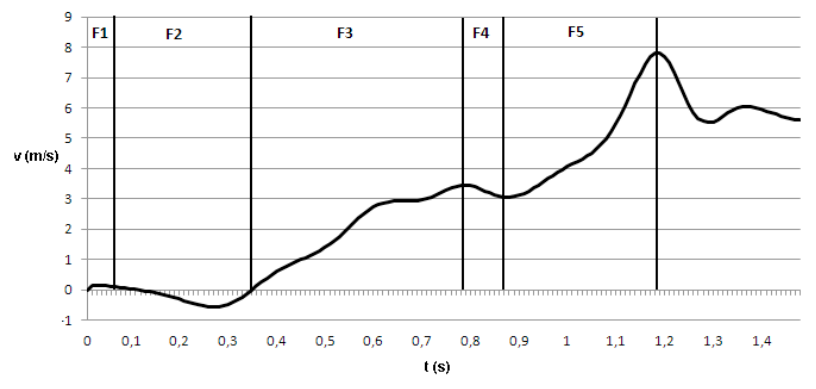
Fáze 1 – doba reakce – začíná v čase 0 sekund a končí v okamžiku zahájení pohybu. Fáze charakterizuje rychlost reakce na jednoduchý signál. Během této fáze zaujímají TO startovní pozici a jsou v klidu.
Fáze 2 – přípravné pohyby – trvá od zahájení pohybu jednotlivých segmentů až do začátku prvního šlápnutí. K pohybu přední (záběrové) nohy, tedy k prvnímu šlápnutí, totiž dochází se zpožděním oproti ostatním částem těla. Prvnímu šlápnutí vpřed předchází dominantní pohyb horní části těla.
Fáze 3 – první šlápnutí – trvá od začátku prvního šlápnutí po jeho konec. Spojnice chodidel je na začátku této fáze přibližně vodorovná se zemí. První šlápnutí končí ve chvíli, kdy se kliky dostanou do kolmého postavení se zemí. Kotníky tedy opisují pouze trajektorii jedné čtvrtiny kružnice. Ve fázi 3 je nejvýraznějším a také nejpodstatnějším pohybem právě pohyb dolních končetin, přičemž přední záběrová noha tlačí na pedál směrem dolů, zadní ho tahá nahoru.
Fáze 4 – překonávání pedálů v úvrati – je daná časovou prodlevou mezi prvním a druhým šlápnutím. Fáze začíná momentem, kdy jsou pedály ve vertikálním postavení a tělo se nachází nad nimi. S posunem pánve vzad a vzpřimováním trupu dochází k současnému podsunutí kola vpřed. Fáze končí začátkem druhého šlápnutí, tedy zahájením pohybu pedálů vpřed.
Fázi 5 – druhé šlápnutí – charakterizujeme od začátku druhého šlápnutí až po jeho konec. Konec šlápnutí nastává opět ve chvíli, kdy jsou kliky v kolmém postavení vůči zemi. To znamená, že na rozdíl od prvního šlápnutí se nyní kotníky posouvají o úhel 180˚. Dominantní je opět práce dolních končetin a stejně jako u prvního šlápnutí je jedna noha v tlaku, druhá v tahu, kotníky se tedy pohybují zrychleně.
Provedení těchto pěti fází trvalo oběma jezdcům téměř stejně, TO 1 zvládl start za 1.165 s, TO2 za 1.126 s. Následující tab. 1 ukazuje časové trvání jednotlivých fází u TO1 a TO2. Hodnoty jsou u obou jezdců velmi podobné. Nejkratší čas trvala 1. fáze, tedy doba reakce (5.2–5.9 %), o něco málo déle pak fáze 4, překonávání pedálů v úvrati (7.9–8.5 %). Přibližně stejně dlouho trvala 2. a 5. fáze, tedy přípravné pohyby a druhé šlápnutí, procentuálně se jedná o 23.8–29 % celkového času. Nejdelší fází byla u obou jezdců ta 3., to znamená první šlápnutí (32.5–36.5 %).
Tab. 1 Doba trvání jednotlivých fází bikrosového startu
|
fáze |
čas (s) |
čas (%) |
čas (s) |
čas (%) |
|
TO1 |
TO1 |
TO2 |
TO2 |
|
|
1 |
0.069 |
5.9 |
0.059 |
5.2 |
|
2 |
0.277 |
23.8 |
0.286 |
25.4 |
|
3 |
0.424 |
36.4 |
0.366 |
32.5 |
|
4 |
0.099 |
8.5 |
0.089 |
7.9 |
|
5 |
0.296 |
25.4 |
0.326 |
29.0 |
|
celkem |
1.165 |
100 |
1.126 |
100 |
Hlavními sledovanými parametry při podrobnější analýze jednotlivých fází byly úhly v hlavních kloubech, tzn. v lokti, rameni, kyčli a koleni, jejich změna během pohybu, rychlost a pořadí zapojování jednotlivých segmentů. V následujících tabulkách uvádíme pouze vybraná data.
Fáze 1 – doba reakce
V této fázi se jezdec nachází v přípravné pozici, kterou je důležité specifikovat, protože vytváří podmínky pro první pohyby po startovním signálu.
U testované osoby 1 odpovídá ostřejší úhel v lokti a rameni na pravé polovině těla (tab. 2) bočnímu vychýlení a naklonění trupu nad pravou nohu, která je vpředu. Vypovídá o tom také menší úhel v pravém kyčelním kloubu. Výrazný je rozdíl mezi úhly v pravém a levém koleni. Je to způsobeno náklonem pánve za střed spojnice chodidel. Náklon je velice výrazný, těžiště je posunuto hodně vzad.
Tab. 2 Startovní pozice – úhly svírající vybrané klouby těla
|
kloub |
TO1 |
TO2 |
||
|
úhel (°) |
úhel (°) |
|||
|
levá strana |
pravá strana |
levá strana |
pravá strana |
|
|
loket |
162 |
150 |
157 |
155 |
|
rameno |
101 |
90 |
95 |
97 |
|
kyčel |
90 |
88 |
78 |
89 |
|
koleno |
131 |
171 |
149 |
142 |
U testované osoby 2 jsme u úhlu sevřeného v loktech a ramenou zaznamenali téměř stejné hodnoty (tab. 2), které vypovídají o tom, že TO2 má symetrické postavení trupu a paží. Dá se předpokládat, že váha je rozložena na řídítkách rovnoměrně. Rozdílný úhel u pravé a levé kyčle je způsoben postavením jezdce v pedálech. Levou nohu má nastavenou dopředu. Ostřejší úhel v pravém koleni značí stejně jako u TO1 postavení pánve za středem spojnice chodidel.
Fáze 2 – přípravné pohyby
Čas 0 sekund byl při zpracování dat určen jako moment, kdy se na semaforu rozsvítí červené světlo. To je vůbec první signál, který jezdec může před zahájením startovního pohybu zaregistrovat. Rychlost reakce na tento signál byla u TO1 0,069 s, což se řadí mezi nadprůměrné hodnoty. Výrazně dříve se do pohybu zapojuje levé koleno, čímž začíná fáze 2. O něco dříve se zapojuje také pravé zápěstí, ostatní segmenty následují pak téměř zároveň. Na pohyb levého zápěstí, loktů a hlavy hned navazuje i pohyb ramen, boků, pravého kolene a kotníků. U TO2 je pohyb zahájen v levém lokti v čase 0,059 s, to je opět velmi nadprůměrná hodnota. Následuje i druhý loket, obě zápěstí, koleno a kotník pravé (zadní) nohy. Pohyb zadní nohy je přenášen do pohybu boků a ramen, až jako poslední se zapojuje pravá (přední) noha a hlava. Levé rameno a loket se do pohybu zapojují o něco dříve, než se zapojují na pravé straně. Dá se tedy předpokládat, že jezdec se naklání mírně na levou stranu, čili nad přední nohu, která je v záběru. Rozdíl u TO je v zapojení ramen a loktů do pohybu, což má vliv na přenášení váhy na pravou nebo levou polovinu těla. U TO1 se lokty a ramena zapojují současně, z popisu startovní pozice totiž vyplývá, že TO1 má před zahájením pohybu již přenesenou váhu nad přední nohou. TO2 přenáší váhu nad přední nohu až při začátku pohybu, proto se rameno a loket na této straně zapojují dříve, než jak je tomu na straně druhé.
Obr. 3 Výchozí a konečná pozice u fáze 2

Fáze 2, trvající od započetí pohybu do začátku prvního šlápnutí (obr. 3), je charakteristická přesunem těžiště dopředu nad chodidlo přední nohy.
V tabulce 3 a 4 jsou uvedeny výchozí a konečné hodnoty sledovaných veličin ve fázi 2 u obou TO. Nárůst rychlosti jednotlivých částí těla je u obou TO podobný, u některých segmentů dokonce stejný. Za povšimnutí stojí fakt, že rychlost segmentů na konci fáze je u obou TO vyšší u levé poloviny těla, a to i přesto, že má každá TO jinou záběrovou nohu (TO1 – pravá, TO2 – levá). Vliv na to může mít rozdílná rotace trupu.
Tab. 3 TO1, fáze 2
|
sledovaná |
segment |
pravá strana |
levá strana |
||
|
začátek |
konec |
začátek |
konec |
||
|
rychlost (m/s) |
hlava |
0,078 |
1,589 |
||
|
zápěstí |
0,075 |
0,666 |
0,354 |
0,975 |
|
|
loket |
0,760 |
0,575 |
0,226 |
1,278 |
|
|
rameno |
0,165 |
0,982 |
0,088 |
1,312 |
|
|
kyčel |
0,263 |
1,181 |
0,069 |
1,899 |
|
|
koleno |
0,277 |
1,220 |
0,195 |
0,735 |
|
|
kotník |
0,069 |
0,504 |
0,172 |
0,530 |
|
Tab. 4 TO2, fáze 2
|
sledovaná veličina |
segment |
pravá strana |
levá strana |
||
|
začátek fáze |
konec fáze |
začátek fáze |
konec fáze |
||
|
rychlost (m/s) |
hlava |
0,082 |
1,598 |
||
|
zápěstí |
0,077 |
0,838 |
0,180 |
0,473 |
|
|
loket |
0,272 |
1,156 |
0,204 |
0,352 |
|
|
rameno |
0,082 |
1,093 |
0,090 |
1,370 |
|
|
kyčel |
0,037 |
1,179 |
0,083 |
1,570 |
|
|
koleno |
0,065 |
0,812 |
0,020 |
0,809 |
|
|
kotník |
0,094 |
0,436 |
0,094 |
0,436 |
|
Fáze 3 – první šlápnutí
Fáze 3 trvá po dobu prvního šlápnutí. To je velice krátké, protože přední noha je na začátku přibližně vodorovně se zemí a na konci se nachází v nejnižším bodě, kdy jsou kliky kolmo k zemi. Noha tak vykoná trajektorii jen čtvrtiny kružnice (obr. 4).
Obr. 4 Počáteční a konečná pozice u fáze 3
Ve fázi 3 je nejvýraznějším a také nejpodstatnějším pohybem pohyb dolních končetin. Každá noha přitom vykonává jinou funkci. Přední záběrová noha tlačí na pedál směrem dolů, zadní ho tahá nahoru. Velikost zrychlení celého pohybu udává především velikost síly působící na přední pedál. Kromě síly svalové, která je vyvíjena na oba pedály, působí totiž na přední pedál i síla tíhová. Proto je výslednice sil působících na tento pedál mnohem vyšší a dominantnější, pokud jde o velikost zrychlení.
Následující tabulka ukazuje zaznamenané hodnoty na začátku a na konci 3. fáze, z nichž jsou nejpodstatnější rychlosti kolen a kotníků a úhel v kolenním kloubu.
Tab. 5 Tab. 5 TO1, fáze 3
|
Sledovaná veličina |
segment |
pravá strana |
levá strana |
||
|
začátek fáze |
konec fáze |
začátek fáze |
konec fáze |
||
|
Rychlost (m/s) |
rameno |
0,982 |
4,888 |
1,312 |
4,341 |
|
kyčel |
1,181 |
2,919 |
1,899 |
3,322 |
|
|
koleno |
1,220 |
2,584 |
0,735 |
2,876 |
|
|
kotník |
0,504 |
3,600 |
0,530 |
4,443 |
|
|
úhel (°) |
kyčel |
11,997 |
154,528 |
114, 977 |
88,037 |
|
koleno |
145,520 |
168,241 |
127,145 |
88,969 |
|
U TO1 nenarůstá rychlost kolen a kotníků lineárně. V první části šlápnutí je zrychlení pohybu pomalejší, hodnoty se pohybují okolo 1.4 m.s-2 ( tab. 5). Je to ve chvíli, kdy se noha zapře do pedálu. Důvodem je vysoký odpor kladený pedálem, a to dříve než se kolo rozjede. V druhé části pohybu je nárůst rychlosti mnohem výraznější, velikost zrychlení dosahuje přibližně 10 m.s-2 (obr. 5).
Obr. 5 Změna rychlosti pravého kolene ve fázi 3 u TO1
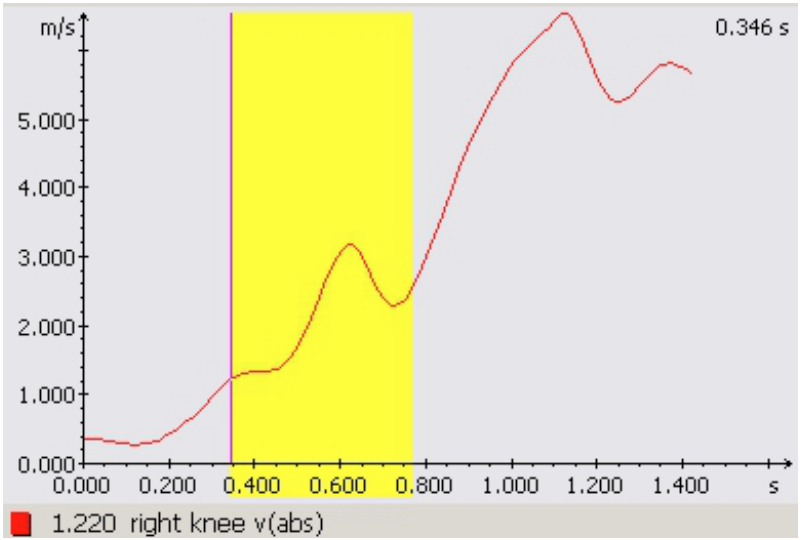
U kotníků se velikost zrychlení do konce prvního šlápnutí již nemění, na konci fáze dosahují kotníky maximálních hodnot rychlosti, konkrétně 3.6 m.s -1 a 4.4 m.s-1, které pak v další fázi pohybu opět klesají. Jinak je tomu u kolen, u nich dochází těsně před koncem fáze k mírnému zpomalení. Je to zřejmě způsobeno změnou úhlu v kolenním kloubu, která pohyb kolene zpomaluje.
Tab. 6 TO2, fáze 3
|
Sledovaná veličina |
segment |
pravá strana |
levá strana |
||
|
začátek fáze |
konec fáze |
začátek fáze |
konec fáze |
||
|
rychlost (m/s) |
rameno |
1,093 |
3,893 |
1,370 |
3,878 |
|
kyčel |
1,179 |
2,954 |
1,570 |
3,154 |
|
|
koleno |
0,812 |
5,290 |
0,809 |
2,559 |
|
|
kotník |
0,436 |
6,127 |
0,436 |
3,795 |
|
|
úhel (°) |
kyčel |
119,168 |
99,962 |
93,979 |
115,624 |
|
koleno |
135,854 |
84,409 |
130,063 |
148,250 |
|
U TO2 je nárůst rychlosti kolen a kotníků plynulejší než u TO1. V grafu závislosti rychlosti na čase není patrné počáteční zpomalení pohybu jednotlivých segmentů (obr. 6). Zrychlení i konečná rychlost je mnohem vyšší na pravé straně, tzn. u zadní nohy – 6.1 m.s-1, než na levé straně – 3.8 m.s -1 (tab. 6). Zrychlení segmentů levé nohy je přibližně 9 m.s-2, na pravé straně přes 12 m.s-2. Protože jsou chodidla obou nohou díky klikám jednou soustavou, která by se teoreticky měla na obou stranách pohybovat stejně rychle, je takový rozdíl ve zrychlení a konečné rychlosti pravděpodobně způsoben změnou úhlu v hlezenním, respektive kolenním kloubu.
Obr. 6 Změna rychlosti pravého kolene ve fázi 3 u TO2
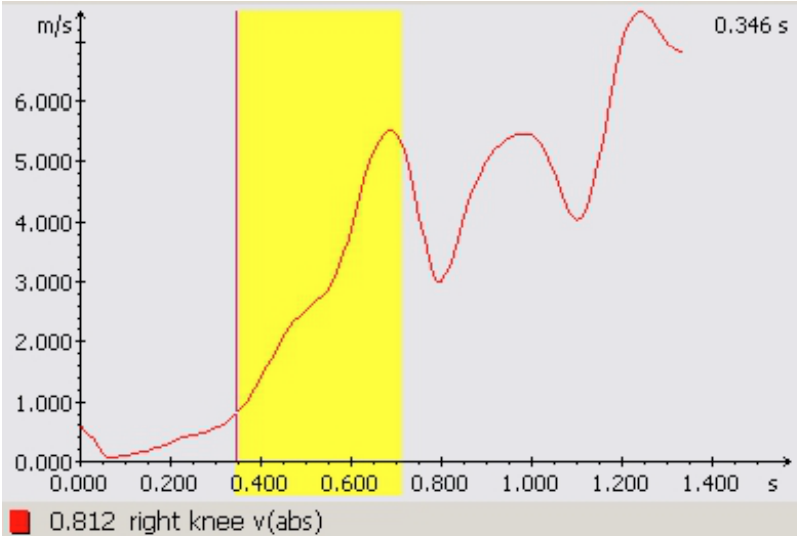
Konečná velikost rychlostí jednotlivých segmentů dolních končetin a průměrné hodnoty zrychlení jsou vyšší u TO2. U TO2 také chybí počáteční zpomalení pohybu. Důvodem je pravděpodobně vyšší síla vyvinutá na pedál, která je způsobena lepší silovou připraveností TO2, jenž je do velké míry ovlivněna pohlavím.
Fáze 4 – překonávání pedálů v úvrati
Fáze 4 začíná po prvním šlápnutí, kdy jsou kliky a pedály v kolmém postavení se zemí a tělo je nad nimi (obr. 7). Síla, kterou v tento moment vyvíjejí dolní končetiny na pedály, působí do středu osy otáčení klik, a proto na ně nemá žádný otáčivý účinek. Proto v této fázi dochází k přenesení těžiště vzad za střed kola, aby se změnil směr působení dolních končetin na pedály. Fáze končí začátkem druhého šlápnutí.
Obr. 7 Výchozí a konečná pozice u fáze 4

Jak vyplývá ze změny úhlů (tab. 7), dochází u TO1 v této fázi zároveň ke dvěma pohybům. Jedná se o posunutí pánve směrem vzad a o podsunutí kola směrem vpřed. Při posunutí pánve směrem vzad dochází ke zmenšení úhlu v pravém kyčelním kloubu ze 154.5° na 127.5° a výrazně se změní i úhel v koleni horní nohy. V tomhle případě je to noha levá, která se přesunem pánve propíná v kyčelním kloubu z 89° na 125°. Větší konečný úhel v ramenech je způsoben podsunutím kola směrem vpřed.
Tab. 7 TO1, fáze 4
|
sledovaná veličina |
segment |
pravá strana |
levá strana |
||
|
začátek fáze |
konec fáze |
začátek fáze |
konec fáze |
||
|
rychlost (m/s) |
kyčel |
2,919 |
3,933 |
3,322 |
3,995 |
|
koleno |
2,584 |
4,097 |
2,876 |
3,524 |
|
|
kotník |
3,600 |
3,076 |
4,443 |
4,743 |
|
|
úhel (°) |
loket |
151,286 |
150,122 |
145,026 |
163,251 |
|
rameno |
43,117 |
55,564 |
49,704 |
74,682 |
|
|
kyčel |
154,528 |
127,505 |
88,037 |
81,614 |
|
|
koleno |
168,241 |
165,718 |
88,969 |
125,045 |
|
U TO2 naznačuje zvětšení úhlu v levém kyčelním kloubu /ze 115.6° na 120.3°/ a v levém kyčelním kloubu /ze 148.3° na 168.2°/ (tab. 8) na konci této fáze, že TO2 nepřesouvá pánev dozadu jako TO1, ale narovnává trup, provádí jeho extenzi. Úhly v ramenních kloubech se mění podobně jako u TO1.
Tab. 8 TO2, fáze 4
|
Sledovaná veličina |
segment |
pravá strana |
levá strana |
||
|
začátek fáze |
konec fáze |
začátek fáze |
konec fáze |
||
|
Rychlost (m/s) |
kyčel |
2,954 |
4,092 |
3,154 |
3,914 |
|
koleno |
5,290 |
3,010 |
2,559 |
3,495 |
|
|
kotník |
6,127 |
5,696 |
3,795 |
3,109 |
|
|
úhel (°) |
loket |
105,815 |
131,124 |
108,130 |
120,622 |
|
rameno |
50,600 |
76,881 |
40,729 |
56,290 |
|
|
kyčel |
99,962 |
74,924 |
115,624 |
120,304 |
|
|
koleno |
84,409 |
103,026 |
148,250 |
168,227 |
|
Fáze 5 – druhé šlápnutí
Fáze 5 je závěrečnou fází startovního pohybu. Během ní dochází k druhému šlápnutí, které je na rozdíl od prvního celé. To znamená, že chodidlo vykoná trajektorii půlkruhu (obr. 8). Dominantní je opět práce nohou a stejně jako u prvního šlápnutí je jedna noha v tlaku, druhá v tahu.
Obr. 8 Výchozí a konečná pozice u fáze 5

Jak je vyznačeno v tabulce 9, dochází u TO1 během této fáze ke zvýšení rychlosti pohybu dolních končetin, výrazněji u pravé dolní končetiny, konkrétně v kolenním kloubu ze 4.1 m.s-1 na 6.2 m.s-1, v hlezenním kloubu z 3.1 m.s-1 na 7.3 m.s-1. Zrychlení je relativně stejné po celou dobu, dosahuje hodnot až 16 m.s-2 napravé noze. Na levé noze je zrychlení pohybu menší, okolo 8 m.s-2. Tento rozdíl můžeme pravděpodobně přičítat rozdílné změně úhlu v kolenních kloubech, přičemž změna úhlu tohoto úhlu na pravé dolní končetině je 77°, na levé 33°. Tento celkem výrazný rozdíl by tedy mohl být příčinou vyšších hodnot zrychlení a konečných hodnot rychlosti u pravé dolní končetiny.
Tab. 9 TO1, f áze 5
|
Sledovaná veličina |
segment |
pravá strana |
levá strana |
||
|
začátek fáze |
konec fáze |
začátek fáze |
konec fáze |
||
|
Rychlost (m/s) |
kyčel |
3,933 |
5,392 |
3,995 |
5,308 |
|
koleno |
4,097 |
6,161 |
3,524 |
4,537 |
|
|
kotník |
3,076 |
7,838 |
4,743 |
5,107 |
|
|
úhel (°) |
loket |
150,122 |
156,953 |
163,251 |
133,115 |
|
rameno |
55,564 |
52,759 |
74,682 |
35,510 |
|
|
kyčel |
127,505 |
100,861 |
81,614 |
137,078 |
|
|
koleno |
165,718 |
88,762 |
125,045 |
158,260 |
|
Dle hodnot v tab. 10 dosahuje TO2 vyšších konečných hodnot rychlosti jednotlivých segmentů dolních končetin než TO1. Je to dáno i vyššími hodnotami zrychlení pohybu. U levé dolní končetiny je to v hlezenním kloubu 17 m.s-2, u pravé 9 m.s-2. Rozdílné konečné hodnoty mezi pravou a levou dolní končetinou mohou být tedy opět vysvětleny větší změnou úhlu v kolenním kloubu levé dolní končetiny, konkrétně došlo k flexi ze 168.2° na 104.4°.
Tab. 10 TO2, fáze 5
|
sledovaná veličina |
segment |
pravá strana |
levá strana |
||
|
začátek fáze |
konec fáze |
začátek fáze |
konec fáze |
||
|
rychlost (m/s) |
kyčel |
4,092 |
4,813 |
3,914 |
5,394 |
|
koleno |
3,010 |
4,363 |
3,495 |
6,034 |
|
|
kotník |
5,696 |
5,342 |
3,109 |
8,600 |
|
|
úhel (°) |
loket |
131,124 |
100,193 |
120,622 |
145,016 |
|
rameno |
76,881 |
44,216 |
56,290 |
70,592 |
|
|
kyčel |
74,924 |
119,304 |
120,304 |
87,358 |
|
|
koleno |
103,026 |
161,578 |
168,227 |
104,442 |
|
Diskuse
Celý startovní pohyb bikrosového jezdce je poměrně složitou pohybovou strukturou, kterou lze rozdělit do pěti fází. Jak ukázaly výsledky měření, v každé z těchto fází se musí jezdec zaměřit na jiné charakteristiky pohybu. Jejich optimalizace by měla vést k rychlejší realizaci jednotlivých fází, tedy k jejich časovému zkrácení celého startu, což je jeho hlavním cílem. Podívejme se tedy, co vyplývá z vyhodnocených dat, jaká jsou specifika těchto pěti fází.
V první fázi zaujímá jezdec přípravnou startovní pozici, pro kterou je charakteristická poloha těžiště vzadu. Tato poloha je daná především polohou boků, která je ovlivněna úhly v kolenních kloubech. Obě dolní končetiny jsou v kolenních kloubech v mírné flexi, Lefebvre[7] (2010) doporučuje úhel 15–45º. U naší testované osoby 1 byly zaznamenány úhly o velikostech 8º a 49º. Jedná se o stranově nevyrovnaný postoj, proto jsou tyto hodnoty mimo doporučený rozsah. U TO2 jsou tyto úhly téměř totožné pro oba kolenní klouby (31º a 38º) a svou velikostí vyhovující. V této fázi jezdec nesetrvává příliš dlouho, pouze po dobu reakce na zrakový či zvukový podnět. Gianikellis [9] (2011) považuje rychlost reakce na startovní signál za jeden z nejpodstatnějších faktorů techniky startu, nicméně podle našich měření se jedná přibližně o 0.6–0.7 s., což dělá pouze 5–6 %. Z tohoto hlediska je dle našeho názoru pro první fázi nejdůležitější vytvořit postoj, který bude vytvářet optimální podmínky pro první pohyby ve fázi následující. Jako podstatné se jeví právě mírná flexe kolenních a kyčelních kloubů, kdy jsou příslušné svalové skupiny v izometrické kontrakci a jejich předpětí umožňuje rychlé zahájení pohybu. Izometrickou svalovou činností také jezdec udržuje tělo v rovnovážné poloze, než zahájí samotný start.
Druhá fáze podle našich výsledků trvá přibližně 25 % celkové doby startu a to téměř shodně u obou měřených závodníků, jedná se tedy o časově nezanedbatelnou fázi, jejíž zkrácení se již výrazně projeví na trvání celého startu. Základní charakteristikou tohoto startu jsou přípravné pohyby předcházející prvnímu šlápnutí vpřed. Nárůst rychlosti je nejvýraznější u hlavy, boků a ramen, které svým pohybem vpřed přesouvají těžiště těla nad přední záběrovou nohu a tímto předbíhají dopředný pohyb nohou. Chronologicky se nejdříve zapojuje zadní dolní končetina, od které vychází impuls k pohybu, který se přenáší přes boky vpřed k ramenům a až jako poslední se zapojuje přední záběrová noha. Jelikož je startovní pohyb zahájen mnohem dříve, než padá startovní rampa, pohybují se segmenty dolních končetin nejdříve proti kladnému směru pohybu.Pohyby v této fázi se kloubní spojení dolních končetin dostávají do větší flexe. Tak jsou naše výsledky ve shodě s tvrzením Dorémuse [8] (2011), který uvádí, že účelem těchto pohybů je nakumulovat co nejvíce potenciální energie pružnosti v protažených svalech, aby mohla být následně využita ke konání mechanické práce. Vzhledem k následující fázi se jako nejdůležitější jeví rychlý přesun těžiště těla vpřed zapojením kinematického řetězce segmentů těla od zadní dolní končetiny přes boky k ramenům. Jak zdůrazňuje Dorémus [8] (2011), pohyb ramen nad řídítka za prvé prodlouží fázi tlaku na pedál, za druhé omezí zvednutí pánve, která by se i při zvednutém předním kole měla pohybovat vpřed po přímce paralelní s nakloněnou rovinou. Taktéž Gianikellis et al [9] vidí v náklonu vpřed jeden z významných faktorů ovlivňujících provedení startu. Jak ukázala měření, rychlé provedení tohoto přesunu ramen vpřed je podmíněno oporou zadní dolní končetiny a následným správným chronologickým zapojením příslušných svalových skupin.
Třetí fáze, kterou představuje první šlápnutí vpřed, trvá ze všech fází nejdéle, podle našich měření 33–36% z celkového času. V této fázi pokračuje pohyb kyčlí k řídítkům, čímž jezdec umocní hybnost prvního šlápnutí, jak vysvětluje Lefebvre [7] (2010). Současně vyvíjí jedna noha tlak do předního pedálu, druhá táhne zadní pedál nahoru. Během tohoto pohybu přecházejí téměř všechny klouby z flexe do extenze, čímž je využita nakumulovaná potenciální energie pružnosti v excentricky koncentrovaných svalech. Dochází k nárůstu rychlosti kotníků i kolen. Cílem této fáze je provést toto první šlápnutí s maximálním zrychlením, což je podmíněno vysokou úrovní výbušné síly především extenzorů dolních končetin. Jak se domníváme, nedostatečná úroveň těchto silových předpokladů se projeví nelineárním nárůstem rychlosti, jak ukázala měření, čímž je dosaženo jednak nižší rychlosti segmentů dolních končetin na konci této fáze, a také časovým prodloužením realizace této fáze. Dále se domníváme, že průběh rychlosti sledovaných segmentů může být ovlivněn načasováním a rozsahem již zmíněného pohybu kyčlí vpřed.
Fáze 4 je charakteristická viditelným poklesem rychlosti pohybu kotníků. Toto zpomalení je způsobeno polohou klik, kdy se pedály nacházejí v úvrati a jezdec tak musí překonat jakýsi mrtvý bod. Síly, které doposud dolní končetiny vyvíjely, tedy nahoru a dolů, přestávají mít v tomto okamžiku otáčivý účinek, obě totiž směřují do osy otáčení klik. Proto v této fázi dochází k přenesení těžiště těla vzad za střed kola, aby tím byla usnadněna změna směru působení sil dolních končetin na pedály. V této fázi startovního pohybu tedy můžeme sledovat současné provedení následujících pohybů: posunutí pánve směrem vzad, extenzi v trupu a podsouvání kola směrem vpřed při ventrální flexi v ramenou. Tato fáze je velmi koordinačně náročná, zvláště vezmeme-li v úvahu, že by ji jezdci měli zvládnout ve velmi krátkém čase, aby mohli co nejdříve zahájit druhé šlápnutí a tím vyjet ze startovní rampy dříve než soupeři. Jak ukázala měření, jedná se o pouhých 0,09–0,1 s, což odpovídá přibližně 8% celkového času.
Podstatou páté fáze je provést co nejrychleji druhé šlápnutí. Jedná se o druhou nejdelší fázi celé sledované pohybové struktury, u našich testovaných osob se jednalo o 25–29 % celkového času. Její optimální provedení, tedy maximální zrychlení pohybu segmentů dolních končetin, je podmíněno stejně jako i ve třetí fázi silovými schopnostmi závodníka. Je zde však nezanedbatelná i technická stránka pohybového úkolu, která vychází z předcházející fáze, ve které by se měl jezdec dostat do optimální polohy, ve které bude schopen vyvinout maximální sílu působící na pedály.
Provedená případová studie pohybové struktury startovního pohybu v bikrosu nastiňuje, jaké nejdůležitější proměnné ovlivňují z biomechanického úhlu pohledu její provedení. Na tyto výše uvedené charakteristiky jednotlivých fází je nutné zaměřit se v dalších studiích zvlášť a analyzovat je u většího počtu probandů, aby byly odhaleny jejich podstatné vztahy a závislosti.
Shrnutí
Výsledky našeho měření nelze zobecnit kvůli nízkému počtu testovaných osob. Tato případová studie slouží spíše jako podklad pro další rozsáhlejší výzkumy, které by mohly porovnávat techniku širšího vzorku lidí. Z tohoto hlediska považujeme za nejpřínosnější rozfázování bikrosového startu na základě kinematické analýzy startovní přípravné pozice a změn kinematických parametrů během prvních pohybů startu. Výsledky vedly k rozlišení těchto pěti fází: 1. fáze – doba reakce, 2. fáze – doba trvání přípravných pohybů, 3. fáze – doba trvání prvního šlápnutí, 4. fáze – doba překonávání pedálů v úvrati, 5. fáze – doba trvání druhého šlápnutí. Jedná se o časoprostorově složitou pohybovou strukturu, jejíž optimální provedení závisí především na úrovni koordinačních a silových schopností jedince. Jak ukázala 3D kinematická analýza, první, druhá a čtvrtá fáze vyžaduje přesné provedení komplexních pohybů těla, aby tak byly vytvořeny optimální podmínky pro vyvinutí maximální síly působící na pedály ve fázi třetí a páté. V dalších studiích by bylo vhodné kombinovat kinematografickou metodu s elektromyografií, která by poskytla informace o konkrétních zapojených svalech během jednotlivých fází startovního pohybu. Výsledky tohoto výzkumu mohou v praxi posloužit zejména trenérům a jejich svěřencům při zlepšování techniky bikrosového startu v přípravě na závody. Kvalitně provedenou analýzou lze podrobně rozebrat individuální techniku jezdce, odhalit odchylky od ideálního technického provedení, popřípadě nalézt chyby. Je také možné porovnávat jednotlivé techniky více jezdců a zjišťovat výhody a nevýhody v prováděné technice. Porovnávat lze i rozdíl v technickém provedení jezdce v různých tréninkových obdobích roku nebo například porovnávat techniku po návratu do tréninku kvůli předchozímu zranění. Kvůli nedostatku literatury, která byla k tomuto tématu doposud vytvořena, je zapotřebí se této problematice nadále věnovat a troufáme si tvrdit, že náš výzkum je v tomto ohledu ojedinělý.
Na základě rozsáhlé literární rešerše směřují autoři J. Sedláček, J. Koštial a M. Zvonař výzkumný záměr do analýzy vlivu použití prostředků supramaximální rychlosti na změny maximální běžecké rychlosti s cílem dosažení zvýšení sportovního výkonu v bězích na krátké vzdálenosti. Autoři článku sledovali u rozsáhlého souboru v rámci dlouhodobého výzkumu změny kinematických parametrů při běhu maximální a supramaximální běžeckou rychlostí. Výsledky výzkumu umožnily optimalizovat parametry ověřované tréninkové metody a formulovat metodické pokyny pro správnou aplikaci této tréninkové metody v praxi.